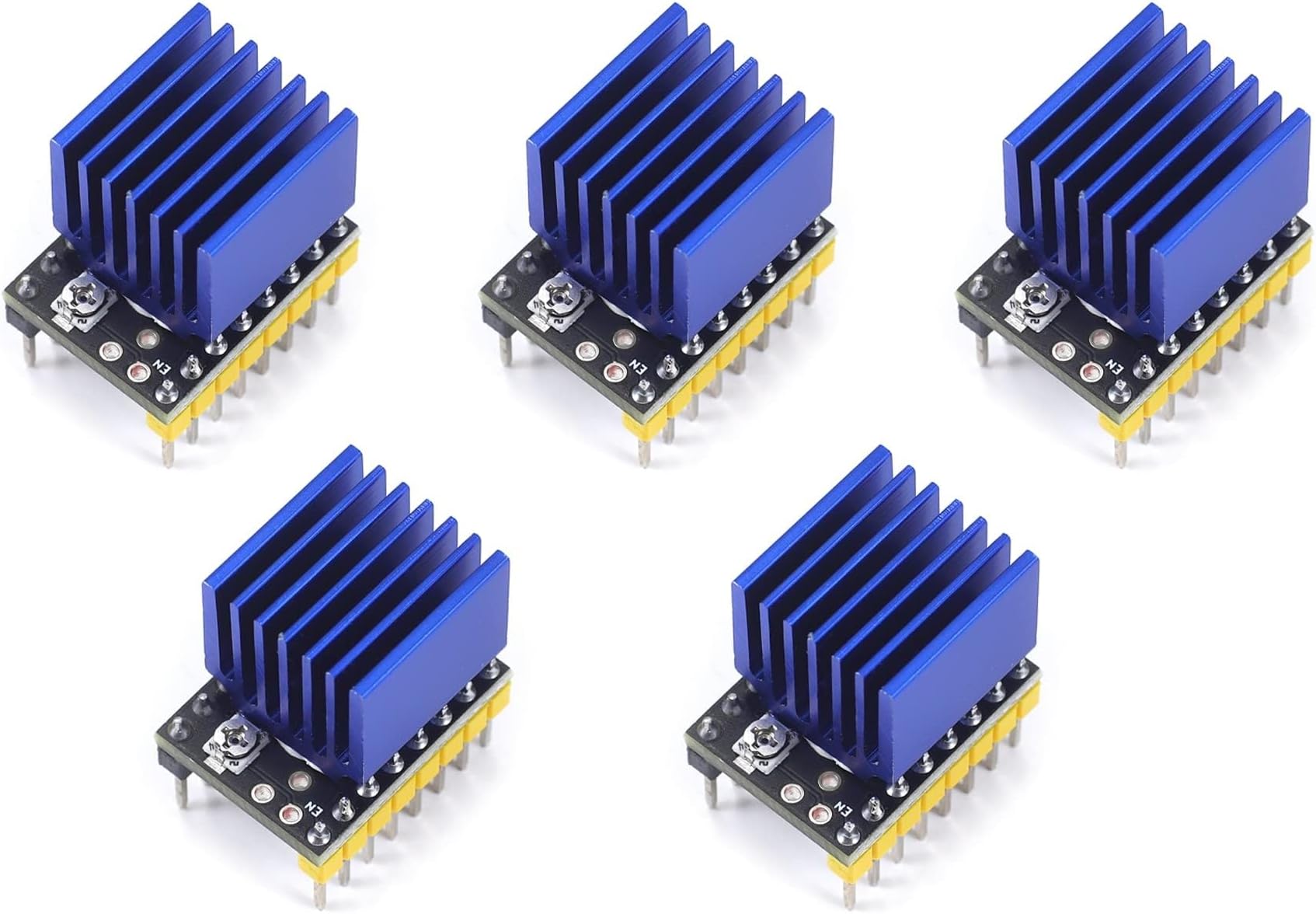

Teyleten Robot TMC2209 V2.0 Stepper Motor Driver StepStick 2.5A UART Ultra Silent for Nano SKR V1.3/1.4 Ender 3 Control Board 3D Printer Parts Replace A4988 5pcs
Product ID: 359797194
Details
- BrandTeyleten Robot
- MaterialMetal
- Model Nametmc2209
- Speed50000 RPM
- Voltage5.5 Volts
⚡5.5V-28V wide input voltage
🤫Ultra silent operation with TMC2209 chip
❄️Large heat sink for superior cooling
$75.71
1
Sold byAmazon EcuadorDelivered byDesertcartCustomer service byDesertcartReturns14 days · 30 with PRO
Buyer Protection · Full refund if your order doesn't arrive as described.
Desertcart purchases this item on your behalf and handles shipping, customs, and support to Ecuador.
Secure transaction
Details
- BrandTeyleten Robot
- MaterialMetal
- Model Nametmc2209
Description
🤖 Silent power, cool control — upgrade your 3D printing game now!
- HIGH CURRENT CAPACITY - Delivers up to 2.5A max current with default 1.25A, providing robust torque for smooth, reliable motor performance.
- WHISPER QUIET PRECISION - Experience ultra silent stepper control with the latest German TMC2209-TA chip, perfect for noise-sensitive workspaces.
- EFFICIENT HEAT MANAGEMENT - Equipped with a large metal heat sink to maintain optimal temperature and prevent overheating during long print sessions.
- SEAMLESS UART INTEGRATION - Easily enable UART communication via jumper cap—no soldering required—making firmware tuning and sensorless homing a breeze.
- POWERFUL VERSATILE VOLTAGE RANGE - Supports a broad input voltage from 5.5V to 28V, ensuring compatibility with a wide range of 3D printer setups.
The Teyleten Robot TMC2209 V2.0 Stepper Motor Driver is a high-performance, ultra-quiet stepper driver designed for 3D printers like Ender 3 and SKR boards. Featuring the original German TMC2209-TA chip, it supports a wide input voltage range (5.5V-28V), sensorless feedback, and up to 2.5A current. Its large heat sink ensures excellent heat dissipation, while UART support via jumper cap allows easy firmware customization without soldering. Ideal for professionals seeking silent, efficient, and reliable motor control.
Specifications
| ASIN | B09BK57KNY |
| Best Sellers Rank | #71,684 in Industrial & Scientific ( See Top 100 in Industrial & Scientific ) #1,124 in 3D Printer Accessories |
| Brand | Teyleten Robot |
| Brand Name | Teyleten Robot |
| Customer Reviews | 4.4 out of 5 stars 106 Reviews |
| Item Weight | 0.03 Kilograms |
| Manufacturer | Teyleten Robot |
| Material | Metal |
| Material Type | Metal |
| Model | G78-1 |
| Model Name | tmc2209 |
| Part Number | G78-1 |
| Speed | 50000 RPM |
| UPC | 755454774471 |
| Voltage | 5.5 Volts |
Common Questions
Yes, all products are sourced directly from authorized retailers in the US, UK, UAE and India. We maintain strict quality control processes and verify each product before shipping. All items come with applicable manufacturer warranties and are covered by our standard return policy.
Delivery times vary by destination country, typically ranging from 3-9 business days. Each order is fully trackable through our system. We handle all customs clearance and use reliable courier partners for last-mile delivery. You'll receive regular updates about your order status via email and our app.
Desertcart is an international e-commerce platform operating since 2014. We securely process thousands of orders globally each day. Every product goes through our quality verification process before delivery, and we provide end-to-end order tracking, 24/7 customer support, and a comprehensive returns policy to ensure a safe shopping experience.
Our prices include the product cost, international shipping, import duties, customs clearance, and local delivery charges. We handle all customs and import procedures, ensuring there are no hidden fees upon delivery. PRO members receive additional benefits including free shipping.
Trustpilot
TrustScore 4.5 | 7,300+ reviews
Shop Global, Save with Desertcart
Value for Money
Competitive prices on a vast range of products
Shop Globally
Serving millions of shoppers across more than 100 countries
Enhanced Protection
Trusted payment options loved by worldwide shoppers
Customer Assurance
Trusted payment options loved by worldwide shoppers.
Desertcart App
Shop on the go, anytime, anywhere.